Software

OctoMap
| Developer | Kai M. Wurm, Armin Hornung, University of Freiburg |
| Description | An Efficient Probabilistic 3D Mapping Framework Based on Octrees. The OctoMap library implements a 3D occupancy grid mapping approach. It provides data structures and mapping algorithms. The map is implemented using an Octree. Contains the main OctoMap library, the viewer octovis, and dynamicEDT3D. |
| Platform | ROS, C++ |
| Tags | #octomap #mapping #voxels #pointcloud |
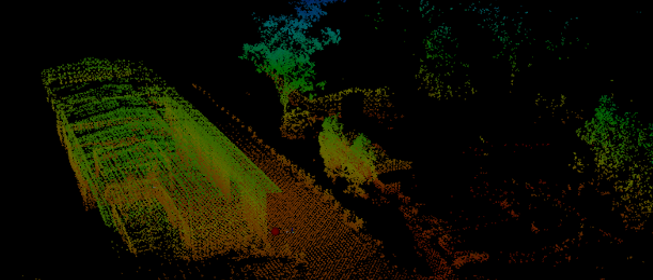
Point Cloud Streaming
| Developer | Inmo Jang (inmo-jjang), The University of Manchester, RAIN Hub |
| Description | Point Cloud Streaming from ROS into Unity |
| Platform | ROS, Unity |
| Tags | #pointcloud #unity #lidar |
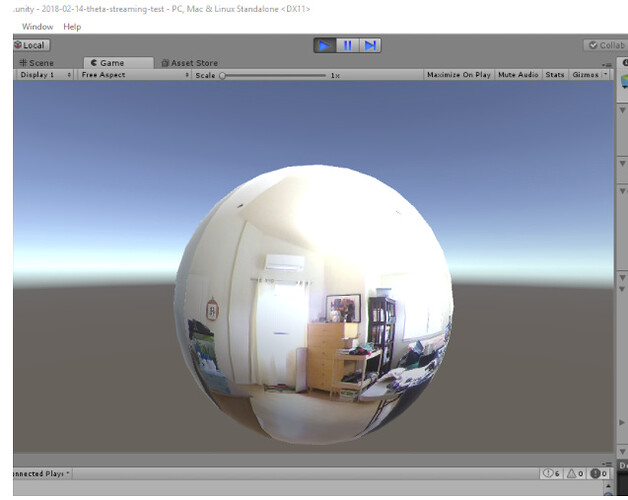
360 Video Streaming
| Developer | Craig Oda (codetricity) |
| Description | 360 RICOH Theta V Video Streaming into Unity with HTC Vive Using Steam VR |
| Platform | Unity |
| Tags | #360video #unity |
DQ Robotics
| Developer | Bruno Vilhena Adorno (The Univerity of Manchester), Murilo Marques Marinho (The University of Tokyo) |
| Description | DQ Robotics is a standalone open-source (LGPLv3) library for robot modelling and control |
| Platform | Python, MATLAB, C++ |
| Tags | #dual #quaternion #control #dqrobotics |

Radiation Message
| Developer | Andy West (University of Manchester) |
| Description | A unified set of message for ionising radiation sensors and simulations with defined structures based on community engagement. |
| Platform | ROS |
| Tags | #radiation #ROS #sensing |
Radiation Plugin
| Developer | Tom Wright and Andy West (University of Manchester) |
| Description | Plugin for Gazebo and ROS to simulate realistic ionising radiation sources, including attenuation through objects. Includes predefined world files for testing of robotic systems in radiation environments. |
| Platform | ROS, Gazebo |
| Tags | #radiation #ROS #sensing #Gazebo |
Radiation Avoidance
| Developer | Andy West (University of Manchester) |
| Description | Method of reducing radiation exposure to mobile robots by adding radiation information to navigation, using ROS costmaps. Can be used for alpha, beta, gamma, and neutron ionising radiation sources. These layers in the costmap can be used multiple times for each sensor or radiation type. |
| Platform | ROS |
| Tags | #ROS #radiation #costmap #UGV |