Datasets

K-band FMCW Data
| Title | K-band FMCW Data for Steel in Sandstone |
| Author | Jamie R D Blanche (Heriot-Watt University) |
| Description | This dataset contains FMCW signal returns in the K-band for a steel rod and bolt inserted into apertures in sandstone. 3 ml of fluid ingress data is also included. |
| DOI | 10.5281/zenodo.5547877 |
| Tags | #dataset #fmcw #continuouswaveradar #steel #sandstone |
K-band FMCW Data
| Title | K-band FMCW Data for Corroded Steel versus Non-Corroded Metal Targets |
| Author | Jamie R D Blanche (Heriot-Watt University) |
| Description | This dataset represents the comparison of FMCW radar responses to lightly corroded steel sheet vs. other, non-corroded metals (and concrete). |
| DOI | 10.5281/zenodo.5549871 |
| Tags | #dataset #fmcw #continuouswaveradar #corroded #steel #noncorrodedsteel |
Newer College Dataset
| Title | Newer College Dataset: Stereo Vision LiDAR IMU |
| Author(s) | Milad Ramezani, Yiduo Wang, Marco Camurri, David Wisth, Matias Mattamala and Maurice Fallon (Oxford Robotics Institute, University of Oxford) |
| Description | Intel Realsense D435i (a stereoscopic-intertial camera) and Ouster OS-1 Gen 1 64 (a 64 multi-beam 3D LiDAR also with an IMU) |
| DOI | 10.1109/IROS45743.2020.9340849 |
| Tags | #dataset #lidar #pointcloud |
Newer College Dataset
| Title | Newer College Dataset: Multicam Vision LiDAR IMU |
| Author(s) | Lintong Zhang, Marco Camurri, Maurice Fallon (Oxford Robotics Institute, University of Oxford) |
| Description | Sevensense Alphasense Core (a 4-camera visual inertial camera) and Ouster OS-0 128 (a 128 multi-beam 3D LiDAR also with an IMU) |
| DOI | |
| Tags | #dataset #lidar #pointcloud |

DARPA SubT Dataset
| Title | DARPA Subterranean Challenge |
| Author(s) | angelacmaio, MihirDharmadhikari, peci1, petrlmat, lorenwel, KazNX, ryhalt-navy, kratkvit (Github) |
| Description | Sevensense Alphasense Core (a 4-camera visual inertial camera) and Ouster OS-0 128 (a 128 multi-beam 3D LiDAR also with an IMU) |
| DOI | |
| Tags | #dataset #lidar #pointcloud |
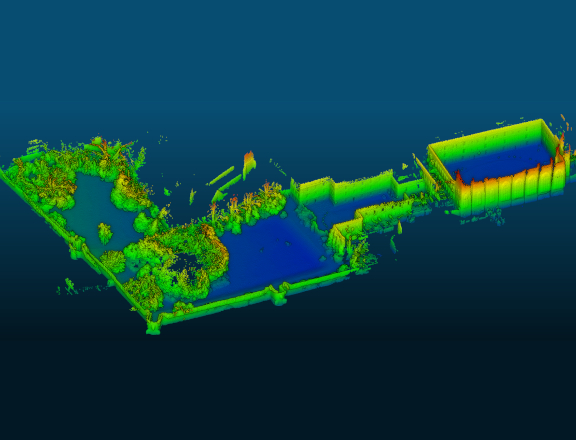
ROAM-CRAS
| Title | ROAM-CRAS |
| Author(s) | danielfbcampos (GitHub) |
| Description | A haRbor multidOmAin Mapping dataset |
| DOI | |
| Tags | #dataset #multidomain |

UofTPed50
| Title | UofTPed50 |
| Author(s) | auToronto |
| Description | a dataset that can be used for benchmarking the positional accuracy of 3D pedestrian detection. Providing positioning information by attaching a GPS system to the pedestrian itself. This dataset consists of 50 sequences of varying distance, pedestrian trajectory, and ego-vehicle trajectory. Each sequence contains one pedestrian. |
| DOI | |
| Tags | #dataset #lidar #autodrive |

River Basin 2014
| Title | River Basin 2014 |
| Author(s) | Land & Property Services |
| Description | Terrain (DTM) & Surface (DSM) elevation models of river basins derived from airborne LIDAR survey systems. |
| DOI | |
| Tags | #dataset #lidar |

Belfast City 2006
| Title | Belfast City 2006 |
| Author(s) | Department for Infrastructure |
| Description | Terrain (DTM) & Surface (DSM) elevation models covering Belfast City, surveyed in March 2006, derived from airborne LIDAR survey systems. Data is provided in ESRI GRID ASCII format. |
| DOI | |
| Tags | #dataset #lidar |

Composite DTM 2020
| Title | Composite DTM 2020 |
| Author(s) | Environment Agency |
| Description | The LIDAR Composite DTM (Digital Terrain Model) is a raster elevation model covering >88% of England at 1m spatial resolution. |
| DOI | |
| Tags | #dataset #lidar |